자율주행차 원리, 다양한 기술의 집합체!
운전자의 개입 없이 목적지까지 안전하게 갈 수 있는 기술인 자/율/주/행! 놀랍게도 먼 미래의 일인 것 같습니다만, 현실에 가까워지고 있다는 것을 알고 있습니까? 물론 지금은 완전히 ‘자’, ‘율’로 ‘주’, ‘행’하는 것은 아니지만 어느 정도 개입이 줄어도 ‘주’, ‘행’이 가능해졌습니다.이를 가능하게 하기 위해서는 최첨단 기술이 탑재된 것은 물론 지금은 너무나 익숙한 인공지능까지 포함되어 있기 때문에 오늘은 자율주행차의 원리에 대해 한번 알아보도록 하겠습니다.

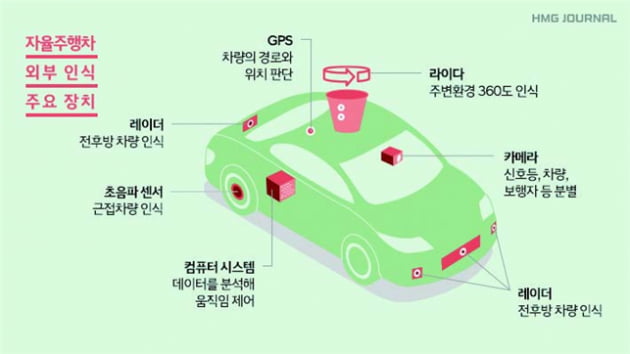
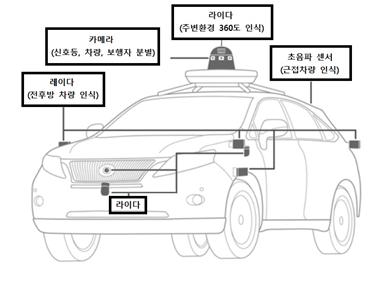
기본적으로 자율주행은 운전자의 개입을 필요로 하지 않습니다. 전후방과 측면에 있는 카메라나 센서, GPS를 바탕으로 인공지능이 스스로 주위 환경을 인식하기 때문에 목적지까지 안전하게 갈 수 있는 것입니다.자율주행자동차 원리의 경우 크게 3단계로 구분할 수 있으며 각각 인지, 판단, 제어 순으로 이뤄지고 있습니다. 미래의 상징으로 여겨졌지만 끊임없는 기술의 발전으로 현실화되고 있으니 미리 알아두는 것이 좋겠죠?
인기글





우선 인지 단계에서는 자동차에 탑재된 카메라와 레이더, 레이저, GPS 등이 활용됩니다. 이를 통해 자동차 주변의 사물을 인지하고 다양한 정보를 축적합니다. 물론 카메라 하나만으로도 시각적인 데이터를 충분히 얻을 수 있지만 비가 오거나 안개, 눈이 내리는 등 기상 환경이 좋지 않으면 제대로 감지하기 어렵기 때문에 레이더가 필요하게 되었습니다.레이더는 많은 지형지물의 정보를 얻는 데 도움이 되지만 단점으로는 다른 차량의 유형을 구별할 수 없다는 점이 있습니다. 그래서 이때 레이저를 통해 3D 정보까지 더해져 보다 정확한 차량 형태와 위치 데이터를 확보하는 방향으로 발전했습니다. GPS는 자신의 위치에 따라 다른 차량에 설치된 GPS와 실시간으로 정보를 확인하는 역할을 합니다.
다음 자율주행차 원리에서 판단단계는 위 인지단계에서 축적된 [데][가][트]에 기초하여 주행전략을 결정하는 [단][계]입니다. 여기서 활용하는 것이 인공지능이고 프로그램을 통해 학습, 추론, 지각, 이해 등 모든 지적 행동을 할 수 있음은 물론 가장 이상적인 결정을 내릴 수 있기 때문에 목적지까지 가장 합리적으로 도착할 수 있도록 돕게 됩니다.그러나 높은 정확도로 학습이 되기 위해서는 시간과 방대한 양의 [데][가]가 필요하다는 단점이 있습니다.마지막 자율주행차의 원리로는 제어 단계가 있습니다. 본격적으로 주행하는 방향과 엔진 구동 방식을 결정하는 단계입니다. 수시로 변화하는 상황에 따라 적절한 명령을 내리는 감시체계가 구축되어 있다고 할 수 있습니다.이런 원리가 숨어 있는 만큼 앞으로 출시될 자동차는 4차 산업혁명의 핵심 기술이 모두 담겨 있다고 해도 과언이 아닙니다. 이렇게 계속 발전한다면 앞으로 우리가 생각하는 자동차의 모습은 크게 달라지고 목적지까지 이동하면서 많은 것을 할 수 있을 것으로 예상되고 있습니다.아직 완벽하게 완성된 기술은 아니지만 단점을 보완한다면 충분히 매력적인 기술이니 지금이라도 미리 알아두시기 바랍니다.